
.jpg)
随着汽车智能化、数字化、网络化等相关技术的飞速发展,自动驾驶成为了各厂商重点研发技术之一。作为L3{1}以上自动驾驶核心传感器的激光雷达,成为了目前各品牌汽车的主要卖点之一。2022年以来,众多车企多款搭载激光雷达的乘用车,如小鹏P5、蔚来ET5、智己L7等也已纷纷投入市场。
那么车载激光雷达拥有哪些优劣势?本文将从激光雷达的工作原理、类别以及优缺点等展开进行讨论。
激光雷达
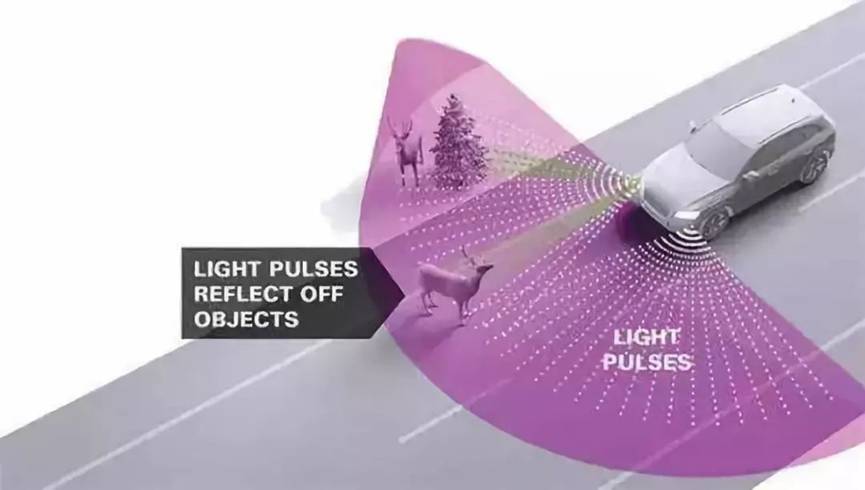
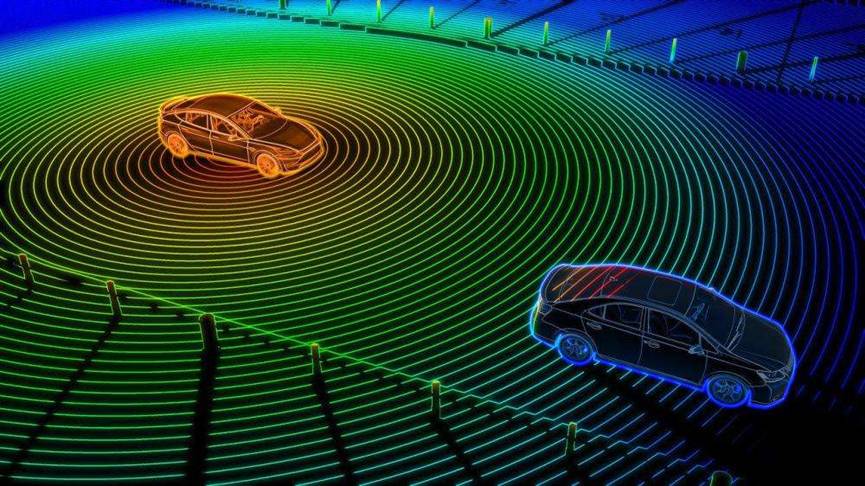
激光雷达(英文:Laser Radar ),是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。它由激光发射机、光学接收机和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
传统的雷达是微波和毫米波波段的电磁波为载波的雷达。激光雷达则是以激光作为载波,可以用振幅、频率和相位来搭载信息作为载体。因此,激光雷达有优于微波及毫米波的一些特点。
激光雷达拥有分辨率高、隐蔽性好和抗有源干扰能力强等优点。其中,距离和速度分辨率高,意味着可以利用距离——多谱勒成像技术来获得目标的清晰图像,这也是激光雷达最显著的优点,多数应用都是基于此。另外,激光直线传播、方向性好、光束非常窄,只有在其传播路径上才能接收到,因此他人截获非常困难,且激光雷达的发射系统(发射望远镜)口径很小,可接收区域窄,有意发射的激光干扰信号进入接收机的概率极低;另外,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强。
ULTRA Puck VLP-32C是Velodyne最新推出的长距离LiDAR传感器,结合了同类最佳的性能和小巧的外形。
激光雷达的分类方式多样,如果按照扫描系统的差异,可以分为机械式、混合固态(转镜式、棱镜式、MEMS振镜)、固态(FLASH、OPA)等。要是根据测距方法的差异,就可以分为TOF激光雷达、FMCW激光雷达。
车载激光雷达
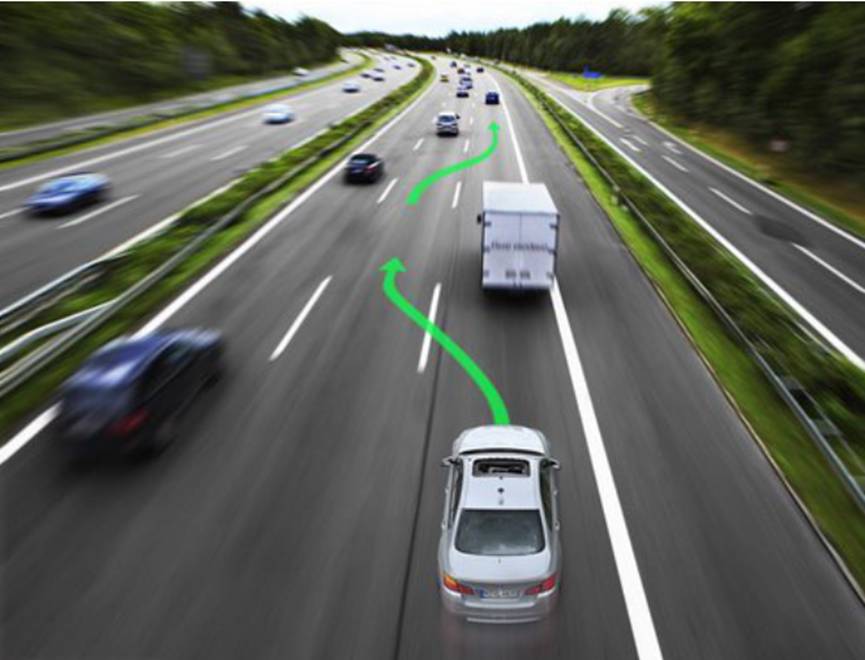
主动巡航系统可自动变道超车
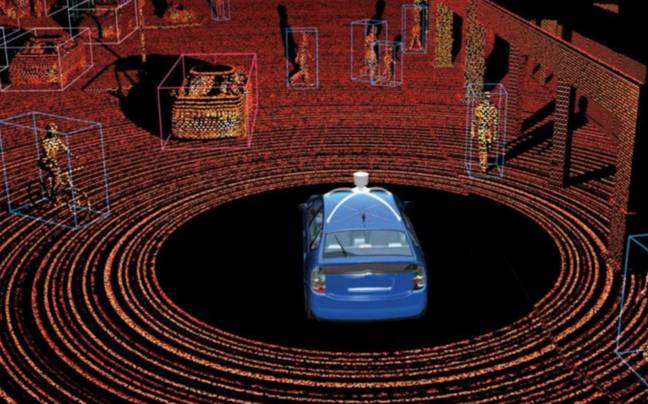
汽车激光雷达目前主要用于辅助自动驾驶系统,能够协助汽车认知路面自然环境,自主整体规划行驶路线。激光雷达通过从激光器中以每秒数百万的速度发送光脉冲,这些光脉冲从物体上反射回来,并被传感器接收,车载计算机以此创建车辆周围环境的3D地图。激光雷达可应用于ADAS系统,例如自适应巡航控制(ACC)、前车碰撞警示(FCW)及自动紧急制动(AEB)等。
目前市场上与激光雷达类似的感知硬件主要包含摄像头、毫米波雷达、超声波雷达、激光雷达以及V2X(注释:意为vehicle to everything,即车对外界的信息交换。简单来说,搭配了该系统的车型,在自动驾驶模式下,能够通过对实时交通信息的分析,自动选择路况最佳的行驶路线,从而大大缓解交通堵塞。除此之外,通过使用车载传感器和摄像系统,还可以感知周围环境,做出迅速调整,从而实现“零交通事故”。例如,如果行人突然出现,可以自动减速至安全速度或停车。)相关硬件等。其中超声波雷达成本极低,但感知距离较近,主要用于停车辅助;而V2X还处在起步阶段,尚未得到大量的应用
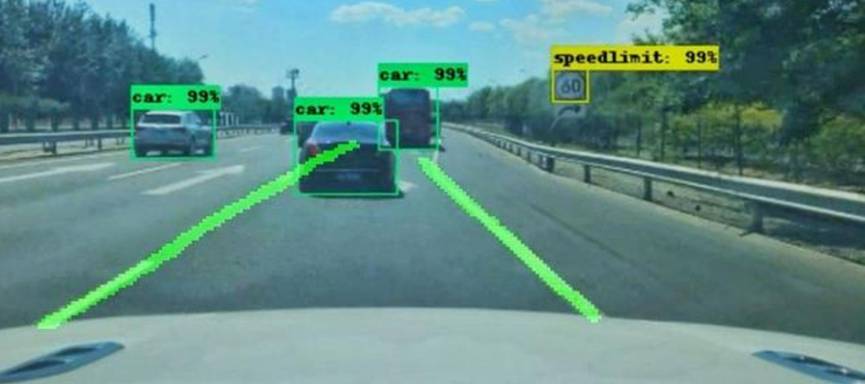
摄像头是目前最主流的自动驾驶感知硬件,类似人眼看世界,系统算法会自动分析图像并找出其中的各种事物。双目摄像头还可以像人眼一样通过夹角分析出前方障碍物的距离。不过视觉十分依赖算法,而算法需要海量的数据进行训练,技术门槛交稿。此外,摄像头受逆光、能见度等环境因素影响颇大,识别准确率在不同环境下会有较大波动。
毫米波雷达在汽车上的应用较久,ACC自适应巡航就是靠毫米波雷达进行实现。目前毫米波雷达成本可控,同时其在恶劣天气下也可以正常工作,并且可以更直接的判断其他车辆的速度,因此在自动(辅助)驾驶中应用广泛。但毫米波雷达识别精度有限,难以判断障碍物的具体轮廓,目前主流的毫米波雷达甚至无法判断垂直高度信息,对小尺寸障碍物的判断更加模糊。
相比于其他的感知硬件,激光雷达可以准确的感知周边环境的三维信息,探测精度在厘米级以内。这就使得激光雷达能够准确的识别出障碍物具体轮廓、距离,且不会漏判、误判前方出现的障碍物。相比前两者目前主流水平,激光雷达普遍的有效探测距离也更远,而更远的探测距离能给车载电脑的提供更多的反应时间。据了解,蔚来ET5搭载的激光雷达最大探测距离为250m,意味着时速100km/h时,ET5有将近9秒的时间对环境做出反应。
激光雷达的缺点首先在价格上。早期的机械式激光雷达动辄几十万上百万,如今华为、大疆等将激光雷达的价格控制在了一千美元以内,已经达到了实用的程度,但相较其他感知传感器依然显得十分昂贵。
另外,激光雷达对工作环境要求也很高。光和电磁波一样,波长越短走的线路越直,绕过障碍物的能力也越弱。毫米波雷达发射的电磁波波长在1-10mm之间,而目前主流的激光雷达发射的激光波长为905nm和1550nm。激光的优势在于聚焦,很长的距离上都不会发散,但这样就无法绕过障碍物,在雨雾、风沙等天气时会受到极大的干扰,甚至无法工作。
因此,激光雷达目前还不具备单独作为汽车驾驶感知硬件的能力,但激光雷达与毫米波雷达、摄像头等进行数据融合,可以得出更全面的周遭环境信息,对自动(辅助)驾驶的路径规划和安全性有着极大的帮助。
技术发展
近日,中国科学技术大学科研团队在相干测风激光雷达方面实现重大突破,首次实现3米和0.1秒的全球最高时空分辨率的高速风场观测。该成果日前在国际学术期刊《光学快报》上发表。
米级分辨率的大气风场探测在航空航天安全、高价值目标保障、数值天气预报等方面具有重大意义。为了获取3米和0.1秒时空分辨率的风场,需再提高现有激光雷达信号检测灵敏度2个数量级以上。
科研团队通过在激光光源、光学收发系统、高速数据采集电路和数据处理算法上对激光雷达进行全面优化,提出一种新的反演算法,大大提高了风场反演精度和稳健性,最终实现了一套全国产化的“产品级”测试样机,具有人眼安全、设备轻便(整装设备40公斤)、工作稳定、环境适应性强等特点。
这次我国激光雷达研制取得了重大突破,为进一步的商用奠定了技术基础。
小结
“兴业证券”研报称,2022年将是激光雷达大面积上市的“元年”,预计2023年起,车载激光雷达赛道将进入持续高速成长期。根据前瞻产业研究院预测,我国车载激光雷达行业市场规模在2026年或将超过430亿元。能够看出,车载激光雷达发展空间巨大。
{1}注释:L3级自动驾驶是指车辆在特定的环境中可以完成驾驶操作、周边环境监控等动作,并不需要驾驶员操作,但在车辆自动驾驶过程中,驾驶员需要保持注意力集中,准备随时接管车辆,以应对自动驾驶系统处理不了的情况。
图片来源于网络
https://www.xianjichina.com/news/details_293858.html
https://zhuanlan.zhihu.com/p/50769120?utm_source=wechat_timeline
https://www.laserfair.com/news/201712/13/66473.html
https://baijiahao.baidu.com/s?id=1699055774327045504&wfr=spider&for=pc
https://news.yiche.com/hao/wenzhang/69582696/
https://finance.eastmoney.com/a/202207112444830146.html
https://baike.baidu.com/item/%E6%BF%80%E5%85%89%E9%9B%B7%E8%BE%BE/2374379?fr=aladdin
https://baijiahao.baidu.com/s?id=1699055774327045504&wfr=spider&for=pc
https://www.dongchedi.com/article/7104873827104096782
相关推荐
-
老虎头上有王字吗?(是不是所有老虎头上都有王字)



话说这是当年刘邦和项羽争帝的时候。 当时刘邦带着五千人马去攻打项羽,谁知半路上中了项羽的埋伏。被打的落花流水,死的死是伤的伤。刘邦只好带着剩下的人撤退,项羽带着一万人马在后面追,追到一片深山老林里,刘邦和他的人马都跑散了。刘邦只好一个人在深山老林里东藏西躲的,一不小心只觉得脚一滑,掉进一个山洞里,
-
植物靠什么传播种子的答案(植物靠什么方式传播种子)
1、动物传播:动物会吃下植物的果实,再随粪便排出种子。2、风力传播:植物的种子带有绒毛,会随着风飘向其它地方。3、机械传播:植物的果荚成熟后会炸开,将其种子弹射除去。4、水流传播:植物的果实掉落水中后,会被水流带去异地。 植物如何传播种子 1、动物传播 动物把种子吞进肚子中,然后经粪便排出,这样种子
-
高清摄像机推荐(什么摄像机好)




松下Lumix FZ330 / FZ300使用 Panasonic DMC-FZ300K 可以轻松实现专业品质的多媒体成像。强大的 24 倍变焦和恒定 f2.8 光圈让您在低光照条件下自信地拍摄,并且不会因较慢的快门速度而导致结果模糊的风险。4K PHOTO 技术可让您以每秒 30 帧的速度拍摄水晶






版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请通知我们,一经查实,本站将立刻删除。